ブロック
ブロック項目は、3Dリコンストラクションで使用する一連の入力データ(写真および点群)を管理します。ブロック項目は、1つまたは複数のリコンストラクションに基づいて、写真、プロパティ(フォトグループのプロパティとしてセンサーサイズ、焦点距離、プリンシパルポイント、レンズディストーション、写真のポーズとして写真の位置、回転)、および任意の点群を管理します。
ブロック項目に基づいてリコンストラクションが生成されます。
完全な写真であれば、3Dリコンストラクションに使用できます。次の条件を満たす写真は、完全な写真といえます。
- ContextCaptureの読み込みフォーマットに対応しており(「入力データファイルフォーマット」を参照)、ファイルが壊れていない
- フォトグループのプロパティおよび、写真の位置と回転(「有用なコンセプト」を参照)が、
これら2つの条件を満たすために、フォトグループのプロパティおよび写真の位置と回転は、そのブロック内の異なる写真から同時に最適化されている必要があります。一貫して最適化された写真セットは、そのブロックの主要構成要素(main component)となります。
完全な写真セットを得るための主な方法としては、次の2つの方法があります。
- ブロックに写真を追加してフォトグループのプロパティを推定させた上で、ContextCaptureの空中三角測量を使用して完全かつ正確なフォトグループのプロパティおよび写真の位置と回転を推定計算する
- XMLファイルにより、完全かつ正確なフォトグループのプロパティおよび写真の位置と回転(たとえば、他のソフトウェアの空中三角測量結果による)を備えた写真をインポートする(「ブロックのインポート」を参照)
ブロック項目は次のプロパティで定義されます。
- 写真:インポートまたは追加した写真、それに関連するフォトグループのプロパティと写真のポーズ(空中三角測量で計算された結果、またはインポートされた空中三角測量結果)。
- 点群:点群ファイルからインポートされたもの。
- 測量ポイント:手動入力またはインポートされた基準点またはユーザータイポイント。測量ポイントは必須ではありません。
- 自動タイポイント:ContextCaptureによって自動抽出されたタイポイント、またはインポートされたタイポイント。
- 位置指定:ユーザータイポイントに基づいて与えられる位置、向き、スケール。
- 追加データ:空中三角測量に役立つ撮影に関する追加情報。
- ブロックに基づいたリコンストラクションのリスト。
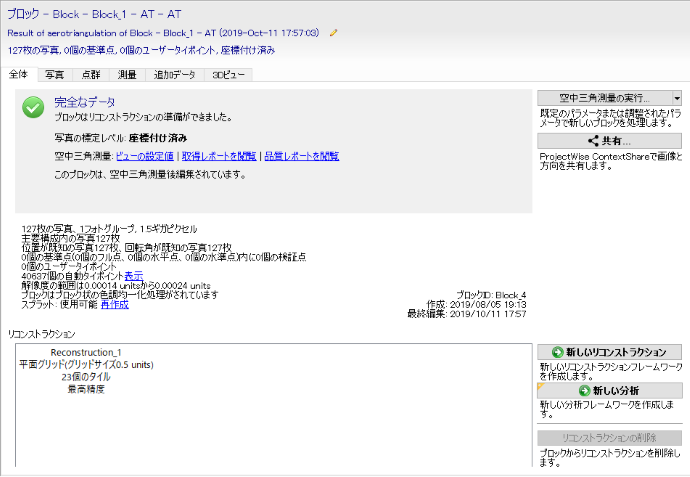
ブロックの「全体」タブは、ブロックのダッシュボードとリコンストラクションを管理します。
便宜上、既知の3Dデータ(写真のポーズ、基準点、点群)を持つブロックは「3Dビュー」タブで表示できます。
ブロックの機能は次のとおりです。
- ブロックのインポート:XMLファイルからブロックをインポートします。
- ブロックのエクスポート:ブロックをさまざまなファイルフォーマットにエクスポートできます。
- ブロック分割:大きな航空写真ブロックをいくつかのパートへ分割します。
- ブロックの切り出し:ブロックから領域を切り出します。
- ブロックのロード/アンロード:アクティブなプロジェクトからブロックをロード/アンロードします。
- ブロックの統合:選択したブロックを1つの新しいブロックに統合します。
- 共有:ProjectWise ContextShareで画像と方向を共有します。